
| | Institute of Computer Science — Knowledge-Based Systems Research Group |
Kurt3D @ RoboCup Rescue |
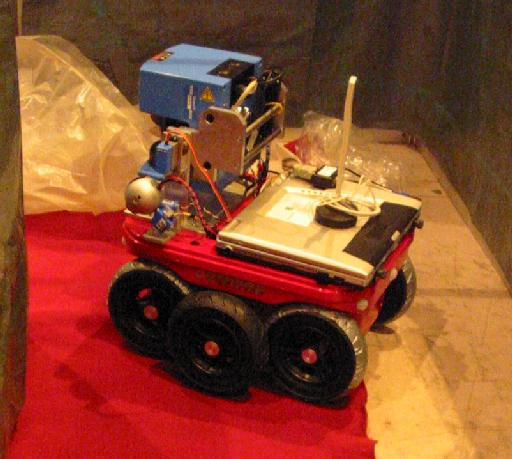
Figure 1: Kurt3D inside the orange arena.
"The goal of the urban search and rescue (USAR) robot competitions is to increase awareness of the challenges involved in search and rescue applications, provide objective evaluation of robotic implementations in representative environments, and promote collaboration between researchers. It requires robots to demonstrate their capabilities in mobility, sensory perception, planning, mapping, and practical operator interfaces, while searching for simulated victims in unstructured environments. As robot teams begin demonstrating repeated successes against the obstacles posed in the arenas, the level of difficulty will be increased accordingly so that the arenas provide a stepping-stone from the laboratory to the real world..." more at the official NIST site
Kurt3D did participate at the urban search and rescue (USAR) robot competition in Portugal 2004 and won the second prize. Here are some images from the competition:
Figure 2: Picture of the RoboCup Rescue Team in Lissabon;
Kiran Raj Tiruchinapalli, Matthias Hennig (tele operator), Rainer Worst, Kai Pervölz, Thomas Christaller, Hartmut Surmann, Andreas Nüchter, Kai Lingemann.







Figure 3: Pictures of Kurt3D in the orange arena. For more and larger size images click here] or Hartmut's page.
(top view, blue points mark 3D scan locations)
(top view, rotated, floor points removed; the region at the start point had a second floor)
 (3D view)
(3D view)
 (3D view)
(3D view)
scanned surfaces as simple mesh, grey values distance depending
DiVX, 63 MB,
MGIF, 130 MB.
scanned surfaces as point cloud
DiVX, 152 MB,
MGIF 140 MB.
Hartmut Surmann, Rainer Worst, Matthias Hennig, Kai Lingemann, Andreas Nüchter, Kai Pervoelz, Kiran Raj Tiruchinapalli, Thomas Christaller, and Joachim Hertzberg. RoboCup Rescue - Robot League Team KURT3D, Germany, Rescue Robot League Competition (CDROM Proceedings RoboCup2004), July 2004. [Get Paper (pdf)].
Hartmut Surmann, Andreas Nüchter, Kai Lingemann, and Joachim Hertzberg. 6D SLAM - Preliminary Report on closing the loop in Six Dimensions, in Proceedings of the 5th IFAC Symposium on Intelligent Autonomous Vehicles (IAV '04), (CDROM preprints) Lissabon, Portugal, June 2004, [Get Paper and Video].
{kind=link}
{kind=link}