This page is Outdated: Please see the current version of UOSSim
USARSim
is a high fidelity simulation of urban search and rescue (USAR) robots
and environments. USARSim is designed as a simulation companion to the
National Institute of Standards (NIST) Reference Test Facility
for Autonomous Mobile Robots for Urban Search and Rescue. High
fidelity at low cost is made possible by building the simulation on
top of a game engine, namely Unreal Tournament 2003.
The aim of our reseach in UOSSim is the seamless integration of the
simulator to our exsisting robot control software. Kurt's odometry,
cameras, and 2D/3D laser range finders are simulated.
Simulation of the Environment
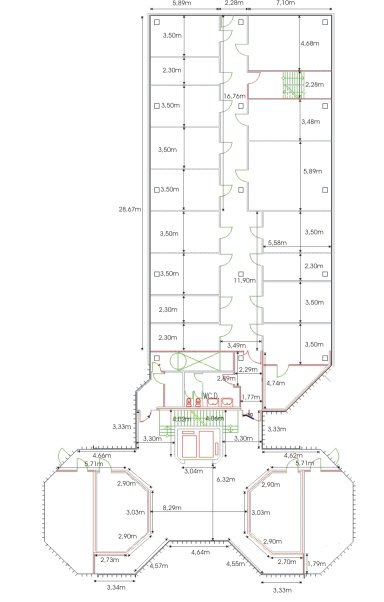


The UOS Building AVZ
Albrechstrasse 28 has been started to developed by the Students Stefan
Stiene and Christian Taubitz. You may download:
Simulation of the Robot Platform KURT2
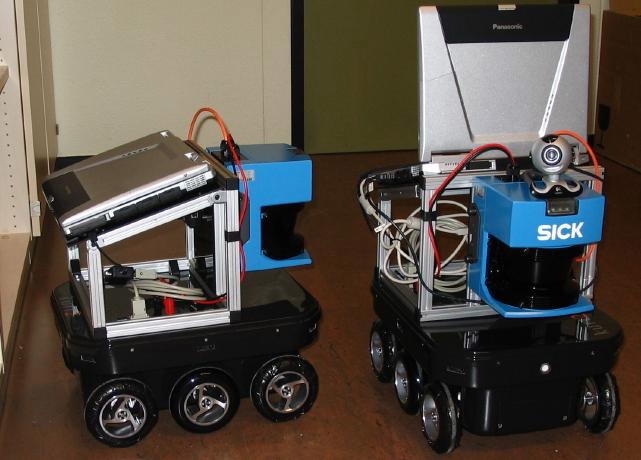

A simulation model of the robot platform KURT2 has been developed by
Jochen Sprickerhof and Sven Albrecht. You may download:
Simulation of the Robot Kurt3D


A preliminary simulation model of the robot platform KURT2 has been
developed by Jochen Sprickerhof and Sven Albrecht. You may download:
Compared to the KURT2 model Kurt3D has larger wheels and a tiltable 3D
scanner. The simulation of the 3D scanner needs to be finished and so
the camera system. Furthermore system identification needs to be done.
A Camera Server for Linux
Download a (slow) camera server for linux here. It's based on the programs xwd and
pnmtojpeg. If you make improvements, let us know!
You may also be interested in this Unreal
Tournament configuration. For example it prevents the mouse hanging at
the windows.
Videos
Here you can download some videos showing the robots KURT2 and
Kurt3D. You may download:
Contact
If you have any questions about the current state of UOSSim please
contact:
Andreas Nüchter
University of Osnabrück
Institute of Computer Science
Knowledge Bases Systems Research Group
Albrechtstraße 28
D-49069 Osnabrück, Germany
