RoboCup is an international joint project to promote AI, robotics and related fields. It is an attempt to foster AI and intelligent robotics research by providing standard problems where a wide range of technologies can be integrated and examined. Though not as well-known as the RoboCup Soccer leagues, the Rescue league with its serious real-life background got more and more attention lately. The idea is to develop mobile robots that are able to operate in earthquake, fire, explosive and chemical disaster areas, helping human rescue workers to do their jobs. A fundamental task for rescue robots is to find and report injured persons. To this end, they need to explore and map the disaster site and inspect potential victims and suspicious objects. Current real deployed rescue robots have only limited usage and are mainly designed for searching for victims and paths through rubble that would be quicker to excavate, for structural inspection and for detection of hazardous material [3]. These robots are designed to go a bit deeper than traditional search equipment, i.e, cameras mounted on poles [3]. The RoboCup Rescue Contest aims at evaluating new rescue robot technology to speed up the development of working rescue and exploration systems.

|
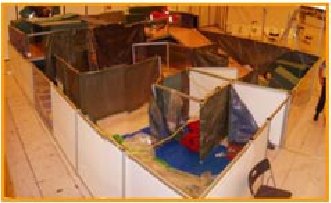
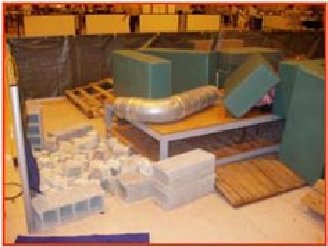
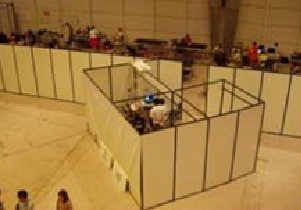
In RoboCup Rescue, robots compete in finding as many ``victims'' (manikins) as possible, within a limited time, in a given, previously unknown arena, and reporting their life signs, situations, and positions in a map of the arena, which has to be generated during exploration. The idea is that, in a real-life application, this map would help humans to decide where to send rescue parties. The arena consists of three subareas (yellow, orange, red) that differ in the degree of destruction, and therefore in the difficulty of traversal. In the ``earthquake phase'' between competition runs, the areas get completely rearranged, including the distribution of the victims. Fig. 1 shows some examples.
The robots in RoboCup Rescue are remotely controlled or surveyed by one or more operators. The operator has no direct view of the arena, only transmitted robot sensor data may be used for control. The degree of autonomy or telecontrol in the robots is at the team's discretion.
Scoring is based on an evaluation function that is modified between the competitions. This function incorporates the number of operators (the fewer the better), the map quality, the quality of the victim localization, the acquired information about the victim state, situation and tag, the degree of difficulty of the area, but also penalizes area bumping and victim bumping.
USARSIM is a simulation of robots and scenarios for disaster and rescue robotics. It was developed by M. Lewis and J. Wang [8] to match the physical test scenarios of the American National Institute of Standards (NIST) [1,2]. The focus of the development was the evaluation of man-robot interaction as well as research of cooperative robots [7,6].
Sophisticated robot simulation in USARSIM is based on a game engine that stems from the computer game Unreal Tournament 2003 or 2004. Due to using a game engine, the simulator shows the excellent graphics and physic simulation of a commercial software product. Since games are produced for a mass market, the costs are low: About $15 for a license.
Unreal Tournament is a multiplayer ego shooter for Windows, Linux and MacOS. The graphics is outstanding, as expected from a commercial product. The Unreal-environment includes a script language that offers developers the possibility to create objects and to control their behavior. The Unreal-editor that comes with the game and the open source program Blender were used to develop environments and models of robot platforms.
Multiplayer ego shooters realize a client server architecture where every player is a client, connecting to the game server. The fast rendering of the scene graphic is done by the client. The server coordinates the players and is responsible for their interaction. The communication protocol is proprietary. However, the software Gamebots modifies Unreal Tournament such that agents can be controlled using an open TCP/IP interface. This interface provides sensor information to the agent control program.
Physical simulation in Unreal Tournament is done by the Karma Physics Engine. Karma processes ridged body movements and allows to simulate motors, wheels, springs, hinges and joints. From these base modules, complicated objects are built through compounding. The compound object comply to the physics in simulation.




|