![\includegraphics[width=0.49\linewidth]{outdoor_closed_loop_odometry_only}](img105.png)
|
![\includegraphics[width=0.49\linewidth]{outdoor_closed_loop_final_wos_step3}](img107.png)
![\includegraphics[width=0.49\linewidth]{outdoor_closed_loop_final}](img108.png)
![\includegraphics[width=0.865\linewidth]{mapped_region_with_detail}](img109.png)
![\begin{picture}(10,10)(-92,-280)\thicklines
{\color[rgb]{1,0,0}\put(0,0){\framebox (30,30){}}
}%
\end{picture}](img110.png)
|
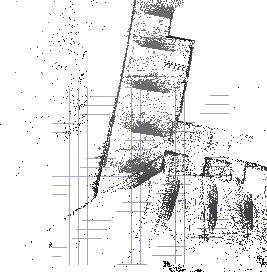
The following experiment has been made at the campus of Schloss Birlinghoven with Kurt3D. Fig. 3 (left) shows the scan point model of the first scans in top view, based on odometry only. The first part of the robot's run, i.e., driving on asphalt, contains a systematic drift error, but driving on lawn shows more stochastic characteristics. The right part shows the first 62 scans, covering a path length of about 240 m. The heuristic has been applied and the scans have been matched. The open loop is marked with a red rectangle.
At that point, the loop is detected and closed. More 3D scans
have then been acquired and added to the map. Fig.
4 (left and right) shows the model with and without
global relaxation to visualize its effects. The relaxation is
able to align the scans correctly even without explicitly closing
the loop. The best visible difference is marked by a red
rectangle. The final map in Fig. 4 contains 77 3D
scans, each consisting of approx. 100000 data points (275
![]() 361). Fig. 5 shows two detailed
views, before and after loop closing. The bottom part of
Fig. 4 displays an aerial view as ground truth for
comparison. Table 1 compares distances measured in
the photo and in the 3D scene. The lines in the photo have been
measured in pixels, whereas real distances, i.e., the
361). Fig. 5 shows two detailed
views, before and after loop closing. The bottom part of
Fig. 4 displays an aerial view as ground truth for
comparison. Table 1 compares distances measured in
the photo and in the 3D scene. The lines in the photo have been
measured in pixels, whereas real distances, i.e., the
 -values of the points, have been used in the point
model. Taking into account that pixel distances in mid-resolution
non-calibrated aerial image induce some error in ground truth,
the correspondence show that the point model at least
approximates reality quite well.
-values of the points, have been used in the point
model. Taking into account that pixel distances in mid-resolution
non-calibrated aerial image induce some error in ground truth,
the correspondence show that the point model at least
approximates reality quite well.
![\includegraphics[width=0.49\linewidth]{before_loop_closing_detail}](img114.png)
![\includegraphics[width=0.49\linewidth]{after_loop_closing_detail}](img115.png)
![\includegraphics[width=0.49\linewidth]{before_loop_closing_detail1}](img116.png)
![\includegraphics[width=0.49\linewidth]{after_loop_closing_detail1}](img117.png)
![\begin{picture}(10,10)(-95,-250)\thicklines
{\color[rgb]{1,0,0}\put(0,0){\framebox (60,40){}}
}%
\end{picture}](img118.png)
![\begin{picture}(10,10)(-255,-250)\thicklines
{\color[rgb]{1,0,0}\put(0,0){\framebox (60,40){}}
}%
\end{picture}](img119.png)
![\begin{picture}(10,10)(0,-80)\thicklines
{\color[rgb]{1,0,0}\put(0,0){\framebox (65,45){}}
}%
\end{picture}](img120.png)
![\begin{picture}(10,10)(-161,-80)\thicklines
{\color[rgb]{1,0,0}\put(0,0){\framebox (65,45){}}
}%
\end{picture}](img121.png)
![\includegraphics[width=45mm]{fahrradstaender}](img122.png)
|
| 1st line | 2nd line | ratio in aerial views | ratio in point model | deviation |
| AB | BC | 0.683 | 0.662 | 3.1% |
| AB | BD | 0.645 | 0.670 | 3.8% |
| AC | CD | 1.131 | 1.141 | 0.9% |
| CD | BD | 1.088 | 1.082 | 0.5% |
Mapping would fail without first calculatingheuristic initial estimations for ICP scan matching, since ICP would likely converge into an incorrect minimum. The resulting 3D map would be some mixture of Fig. 3 (left) and Fig. 4 (right).
Fig. 6 shows three views of the final
model. These model views correspond to the locations of Kurt3D in
Fig. 1. An updated robot
trajectory has been plotted into the scene. Thereby, we assign
every 3D scan that part of the trajectory which leads from the
previous scan pose to the current one. Since scan matching did
align the scans, the trajectory initially has gaps after the
alignment (see Fig. 7).
In addition we used the 3D scan matching algorithm in the context of RoboCup Rescue 2004. We were able to produce online 3D maps, even though we did not use closed loop detection and global relaxation. Some results are available at http://kos.informatik.uni-osnabrueck.de/download/Lisbon_RR/.
![\includegraphics[width=0.49\linewidth]{outdoor_closed_loop_before_closing}](img106.png)
![\begin{picture}(10,10)(-210,-118)\thicklines
{\color[rgb]{1,0,0}\put(0,0){\framebox (24,20){}}
}%
\end{picture}](img104.png)
![\includegraphics[width=0.325\linewidth]{view6}](img123.png)
![\includegraphics[width=0.325\linewidth]{view2}](img124.png)
![\includegraphics[width=0.325\linewidth]{view3}](img125.png)