Large Scale Surface Reconstruction Toolkit
|
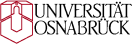
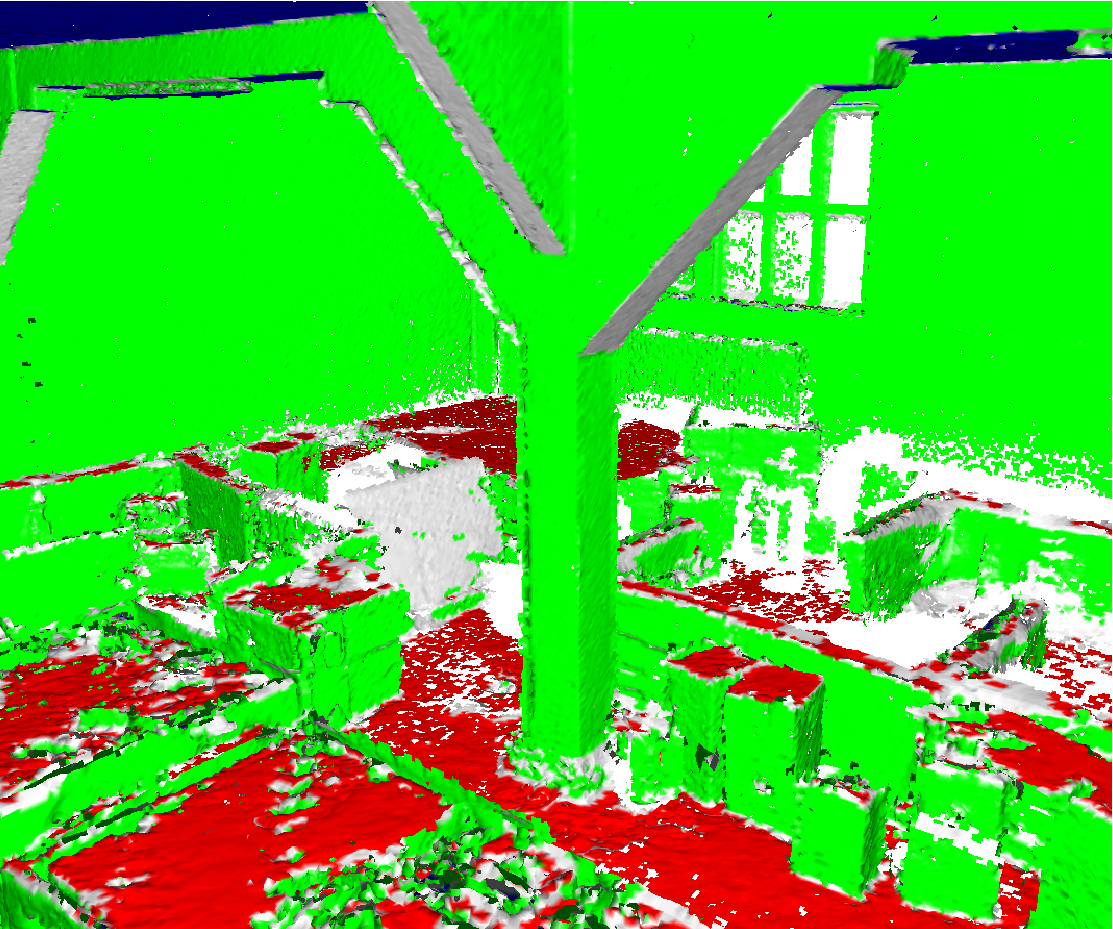
AbstractThis software delivers tools to build surface reconstructions from point cloud data and a simple viewer to display the results. Additionally, the found surfaces will be classified into predefined categories. The main aim of this project is to deliver fast and accurate surface extraction algorithms for robotic applications such as tele operation in unknown environments and localization. This software is under permanent development and runs under Linux and MacOS. A Windows version will be made avialable soon. (Relatively) stable releases can be found in the download section. Furthermore, these releases are integrated into the slam6d project, which can be found here Features of the current release:
Unstable, hence unreleased features
These features will be included in future releases. Developer versions can be found in the project's SVN repository. Feel free to participate! |
| Home | Download | Develop | Documentation | Project Feed | Forums | Publications |
| Thomas Wiemann |
| Last changed: 2010-12-16 |