-

|
Authors
|
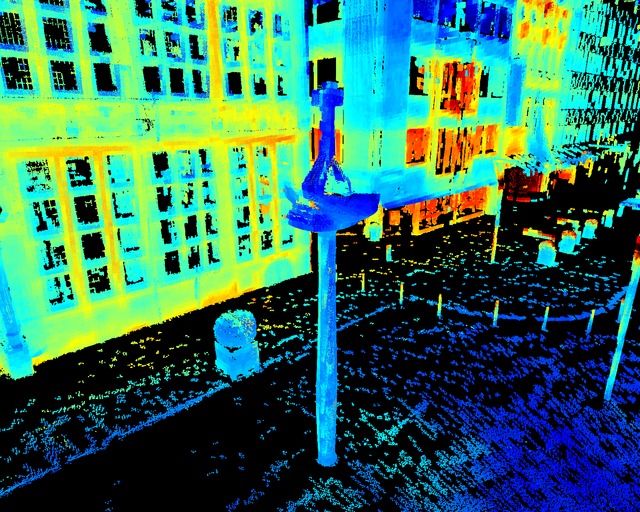
Fabian Arzberger
,
Sven Jörissen
, and
Dorit Borrmann
from the
University of Würzburg
, Germany
|
| Date | 2022-02-28 |
| Location | Würzburg fire academy (geo:49.78176,9.97327) |
| Scanner | Riegl VZ-400 (ground truth), Livox Mid-100 (pendulum- and spherical-system), SICK LMS-141 (RADLER device) |
| #scans | 1 (ground truth), 9215 (pendulum), 20984 (spherical), 12250 (RADLER) |
| #points | 50870092 (ground truth), 92160000 (pendulum), 209850000 (spherical), 6357802 (RADLER) |
| Datatype | X,Y,Z (lefthanded) with reflectance in uosr format |
| Download | M1.tar.xz |
| MD5 | efd8b764b51a7acdd982d628b92bad49 |
| Filesize | 1.92 GiB (7.55 GiB unpacked) |
| README | README.M1 |
| Description |
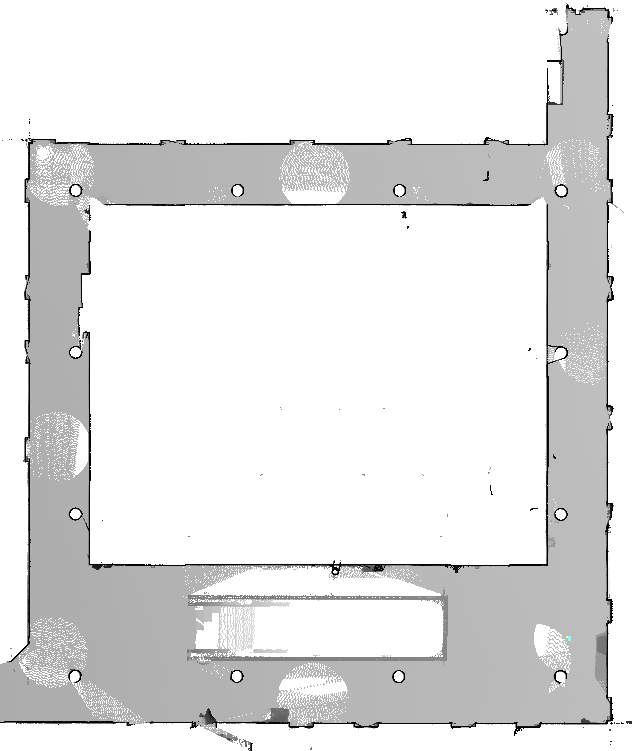
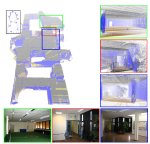
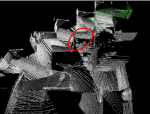
This dataset comes with ground truth data aquired by terrestrial laser scanning (TLS), as well as data from a mobile systems that followed different unconventional trajectories. Consider the README for more information about application of SLAM and comparison to ground truth.
|
-

|
Authors
|
Fabian Arzberger
,
Jasper Zevering
,
Anton Bredenbeck
,
Dorit Borrmann
, and
Andreas Nüchter,
from the
University of Würzburg
, Germany
|
| Date | 2022-02-28 |
| Location | Würzburg fire academy (geo:49.79839,9.90380) |
| Scanner | Riegl VZ-400 (ground truth) and Livox Mid-100 (data) |
| #scans | 1 (ground truth) and 12059 (data) |
| #points | 238725164 (ground truth) and 10000 per scan (data) |
| Datatype | X,Y,Z (lefthanded) with reflectance in uosr format |
| Download | FireAcademy.tar.xz |
| MD5 | 82225cdd7db5e8691ac2ecca180d0f51 |
| Filesize | 3.74 GiB (13.17 GiB unpacked) |
| README | README.fireacademy |
| Description |
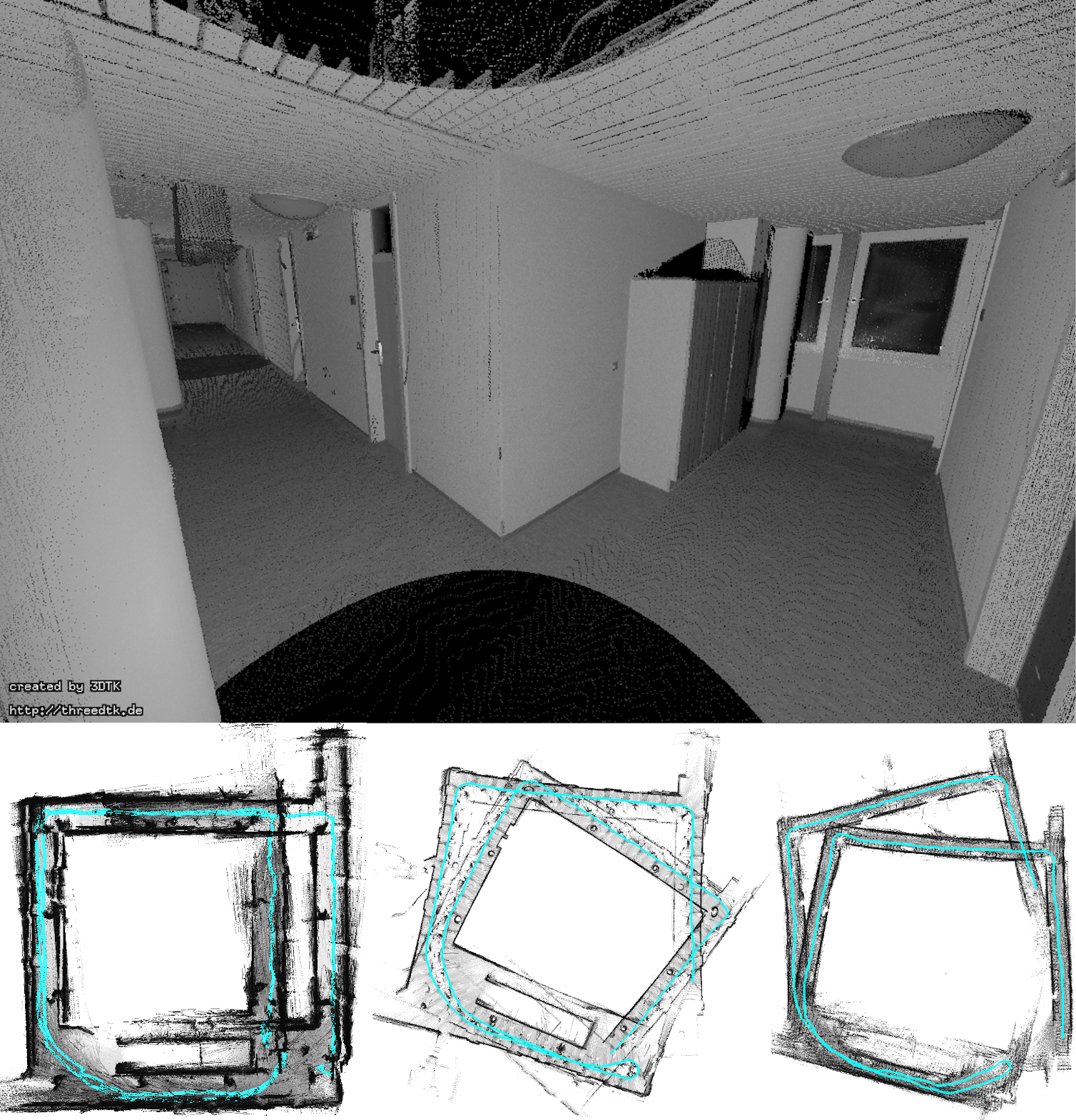
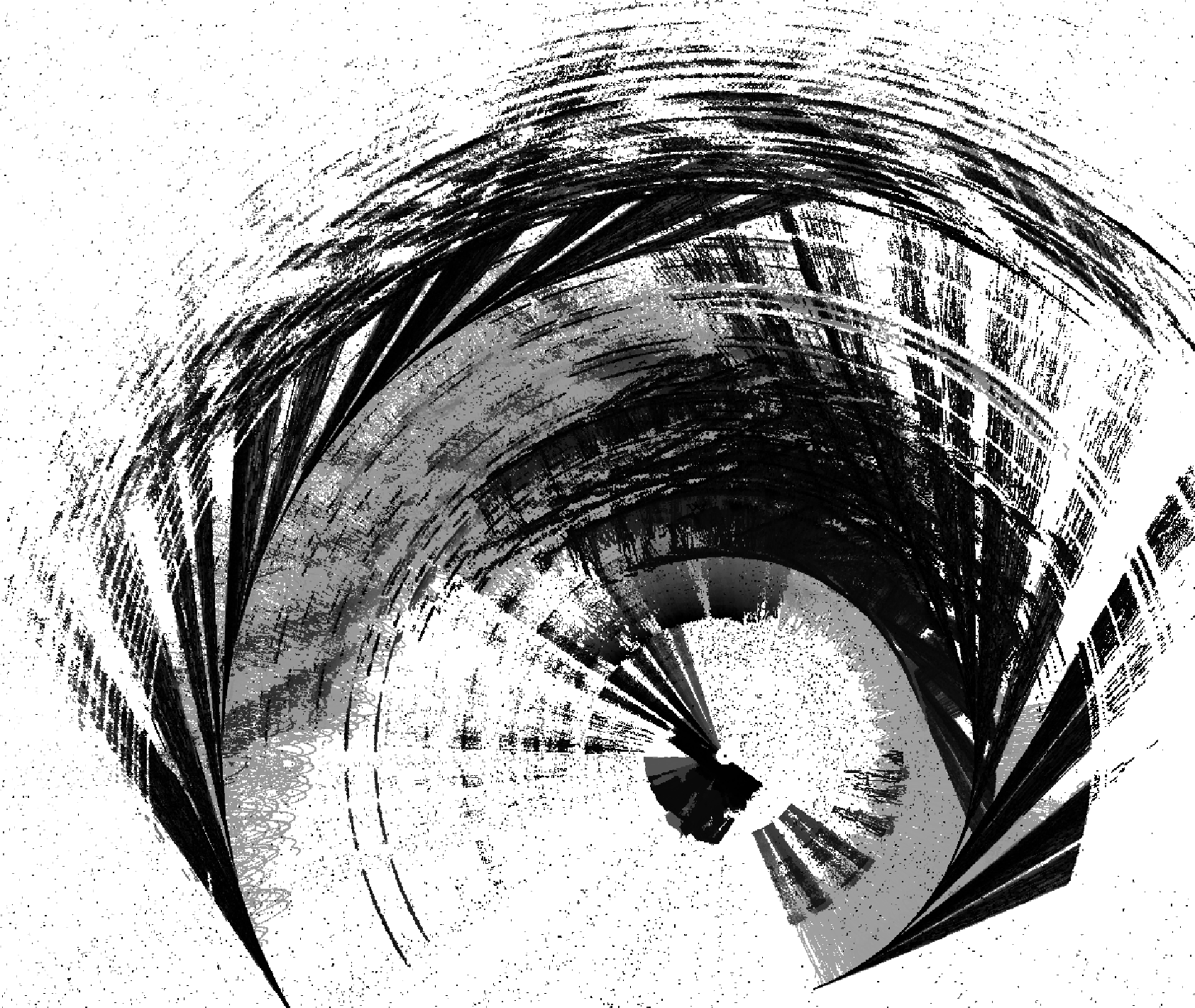
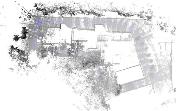
This dataset comes with ground truth data aquired by terrestrial laser scanning (TLS), as well as data from a mobile system that performed a descending and rotating motion at the same time. Consider the README for more information about application of SLAM and comparison to ground truth.
|

-

| Authors |
Johannes Schauer
from the
University of Würzburg, Germany
|
| Date | 2017-09-08 |
| Location | Würzburg university lecture hall (geo:49.78137,9.97165) |
| Scanner | Riegl VZ-400 |
| #scans | 2 |
| #points | 44574647 |
| Datatype | X,Y,Z (righthanded) and binary static/dynamic annotation for change detection in csv format |
| Download | lecturehall.tar.xz |
| MD5 | 8127a8f56a125984c19795e6cecec2b5 |
| Filesize | 435 MiB (1593 MiB unpacked) |
| README | README.lecturehall |
| Description |
The two scans are intended as an input for change detection algorithms. The scans are taken from different vantage points and one scan contains two people while the other one does not.
|

-


-


-
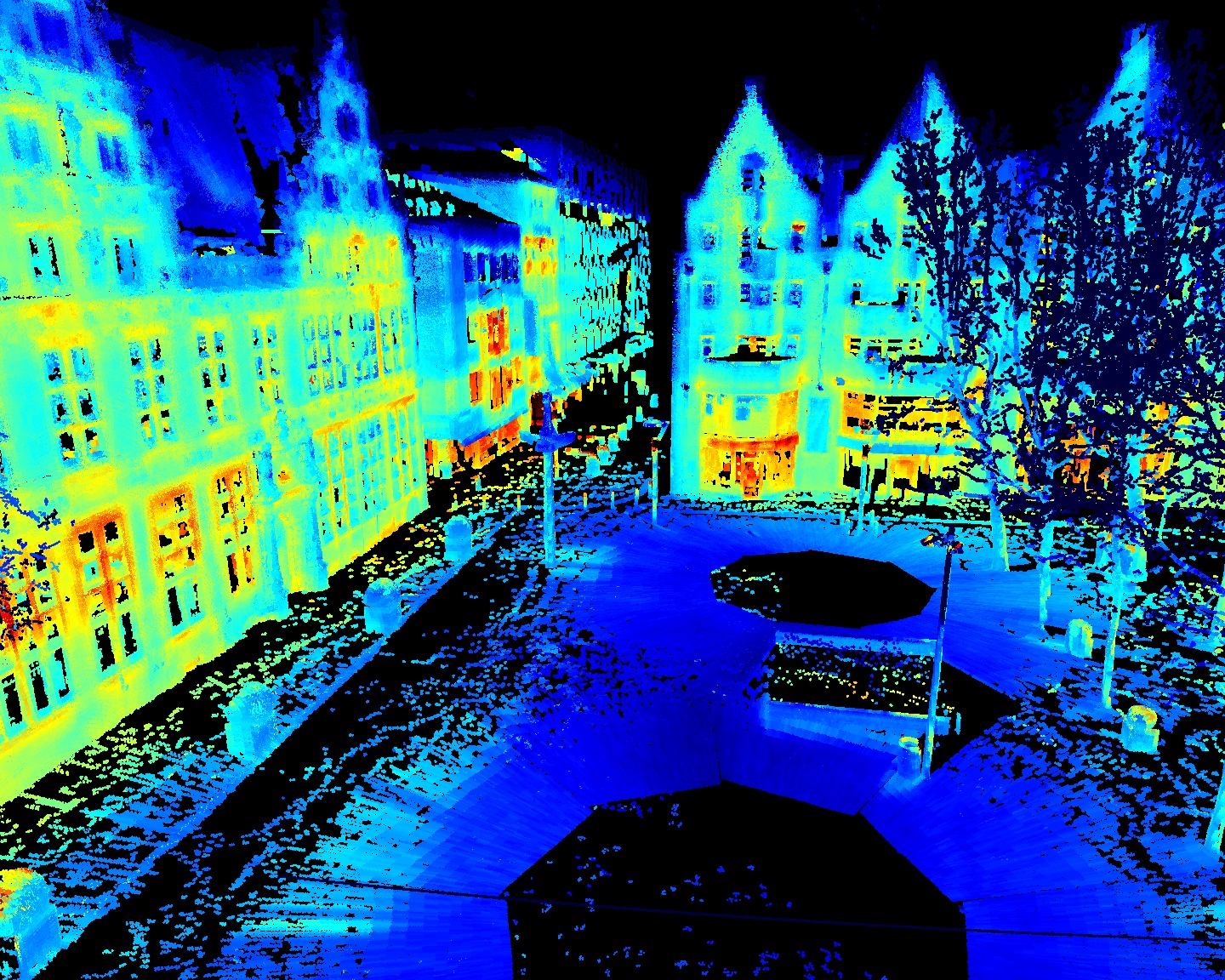
 by Dorit
Borrmann,
Helge Andreas Lauterbach,
Sven Jörissen
from the
University of
Würzburg, Germany and Marija Seder from the University of Zagreb (FER), Croatia.
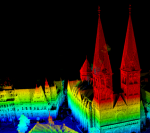
by Dorit
Borrmann,
Helge Andreas Lauterbach,
Sven Jörissen
from the
University of
Würzburg, Germany and Marija Seder from the University of Zagreb (FER), Croatia.
This data set was recorded using a Riegl VZ-400.
It contains eight 3D scans taken in front of the cathedral in Zagreb, Croatia..
Each scan has up to 22,500,000 points with reflectance
values. You can download the
complete data set
with the 3D scans and rough
initial pose estimates acquired by manual registration and the graph file for registering the data.
The final poses are computed by
slam6D.
Further information can be found in the README.

-
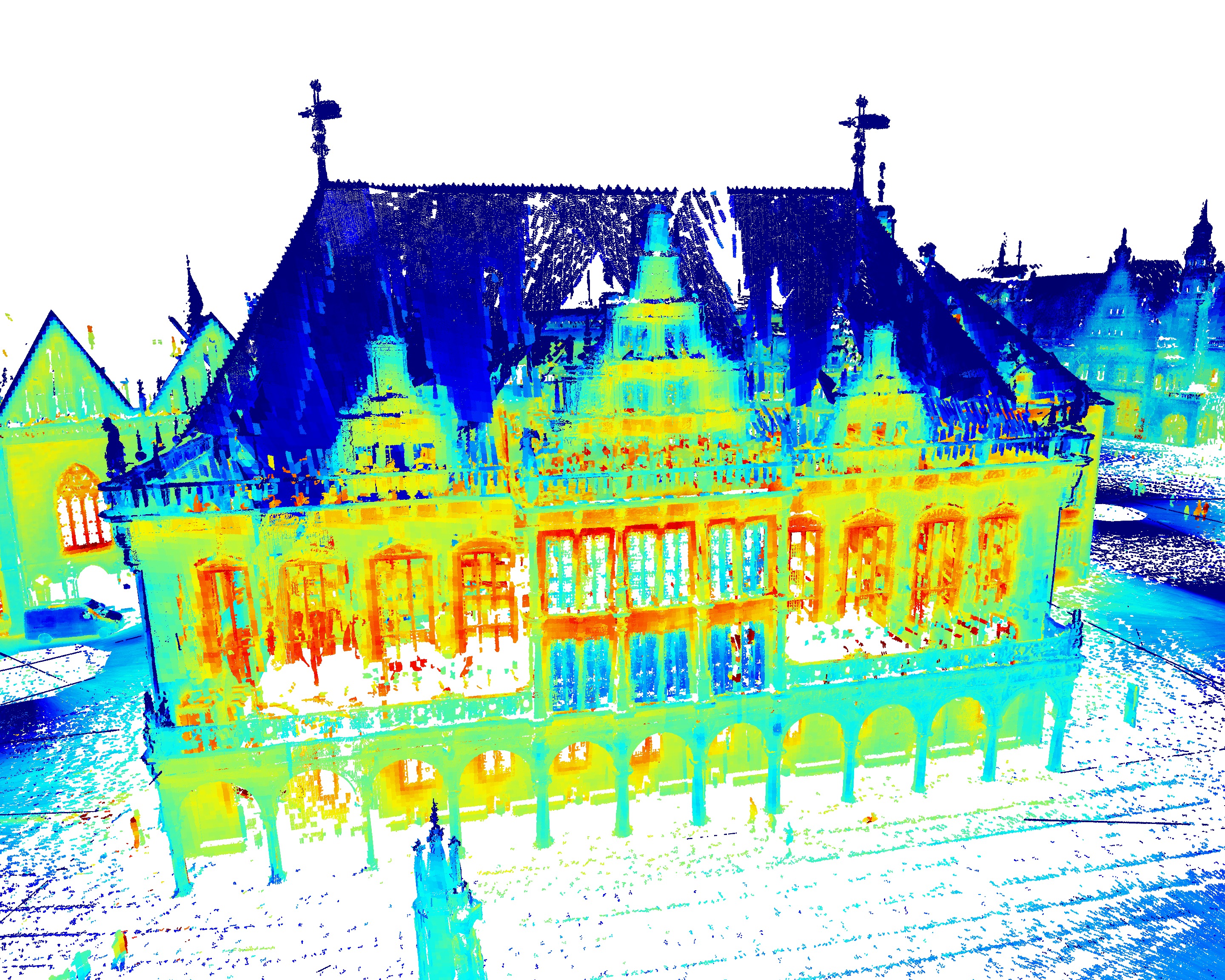
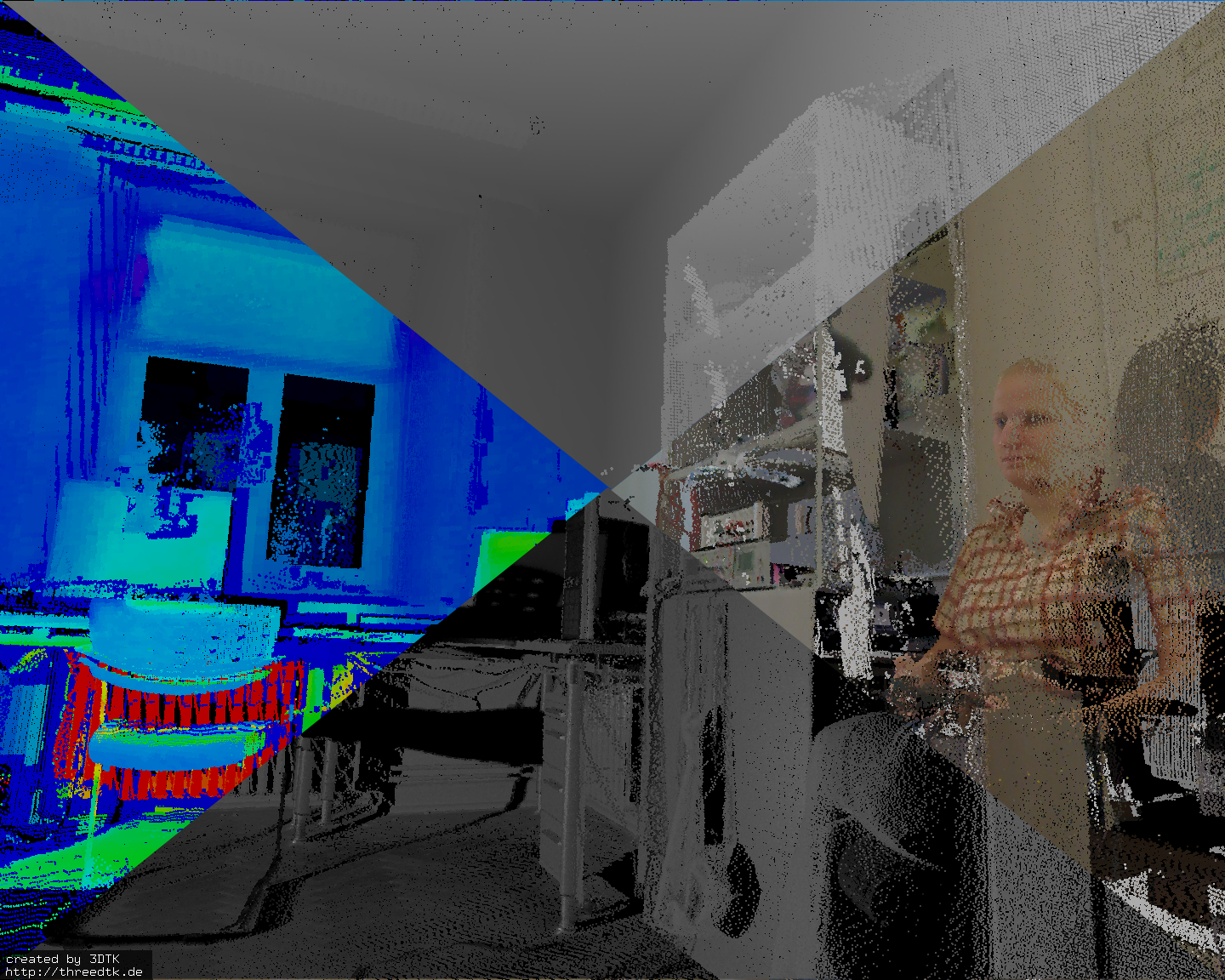
 by Dorit Borrmann and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
by Dorit Borrmann and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
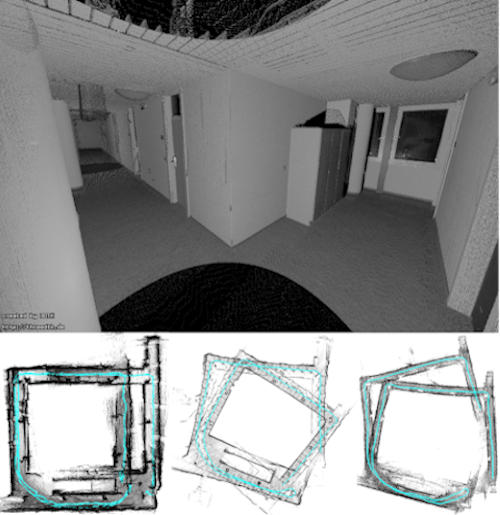
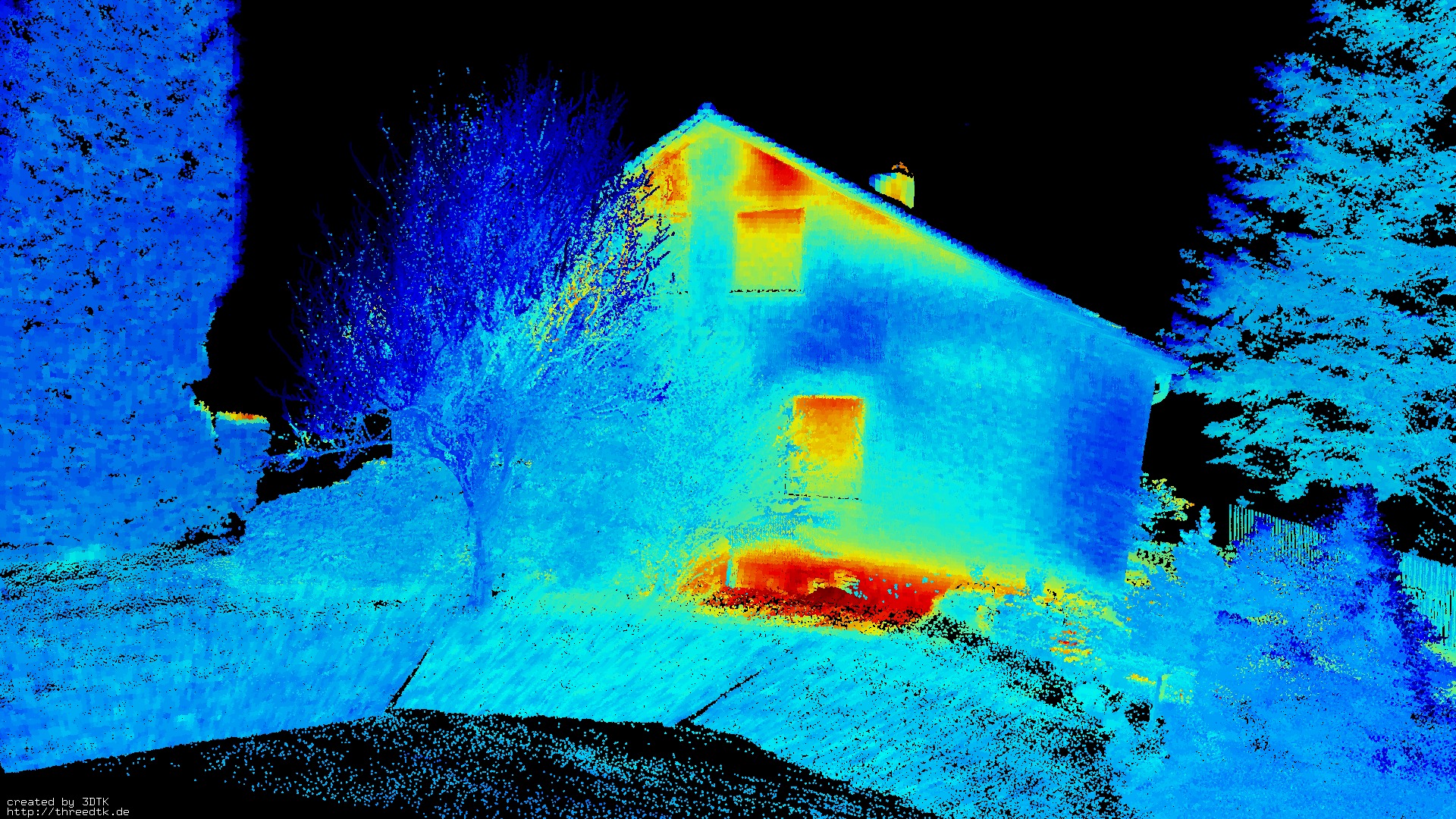
This data set was recorded using a Riegl VZ-400 and a Optris PI IR camera.
It contains several 3D scans taken at a residential house in Germany.
The data set contains two parts. (a) The outside view of the house consisting of data collected at 11 different poses.
(b) The inside view of the house consisting of data collected at 17 different poses on the ground floor.
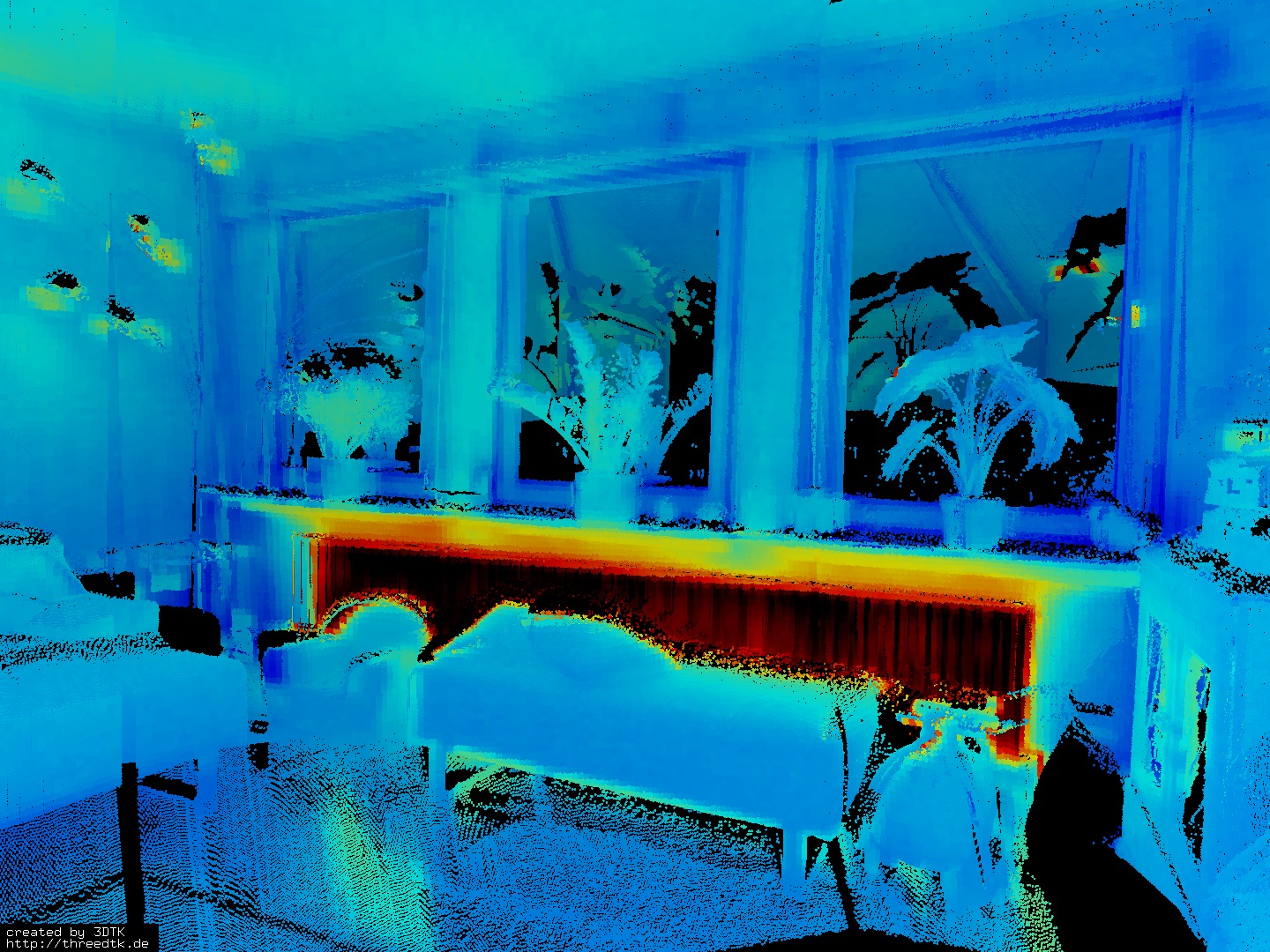
The points from the laser scans are attributed with
the thermal information from the camera. Pose files are calculated using 3DTK based on odometry information. Note: Inside and outside view are not registered into one common coordinate system.
You can download the inside data set and the outside data set.
Further information can be found in the README.
-
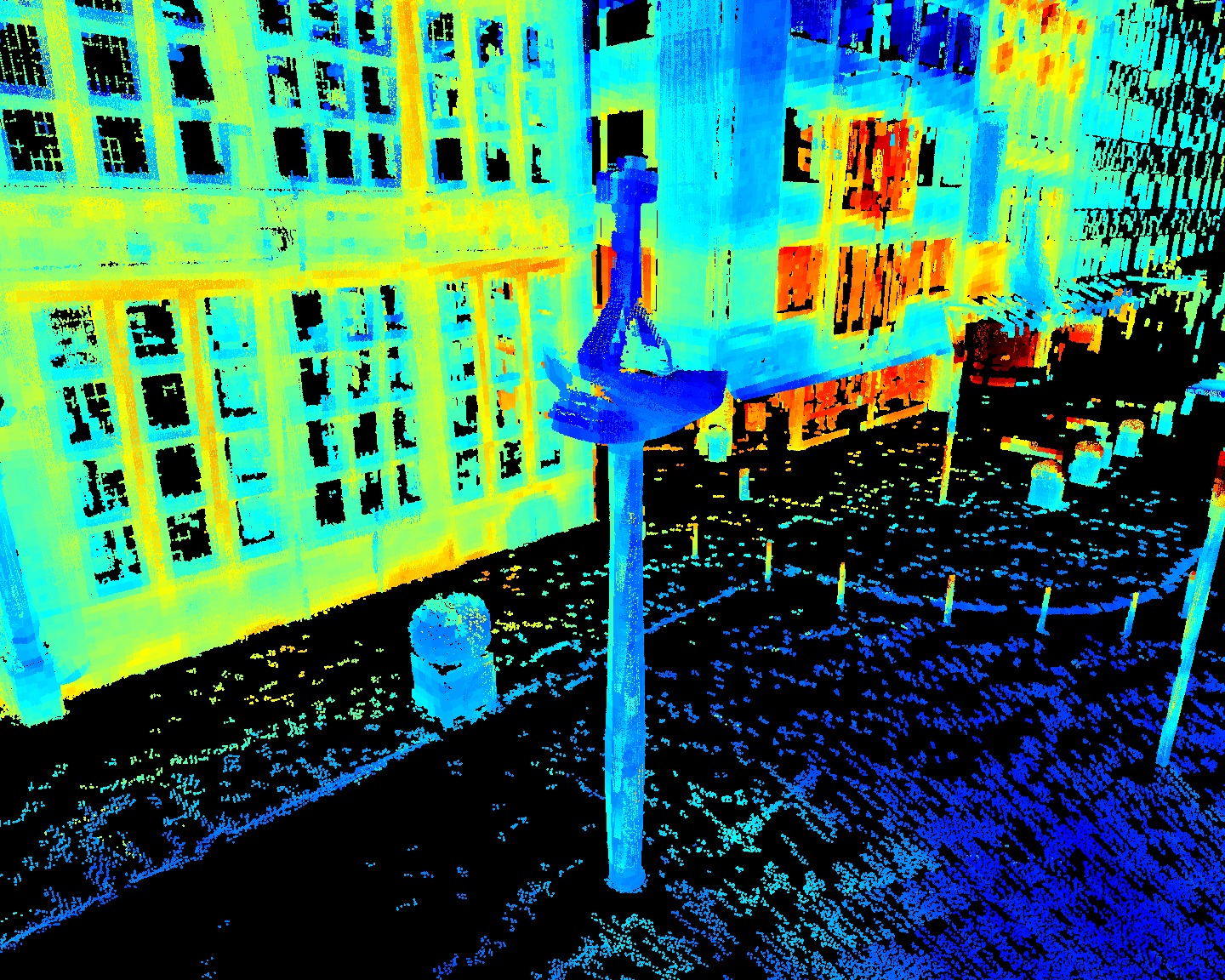
 by Dorit Borrmann and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
by Dorit Borrmann and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
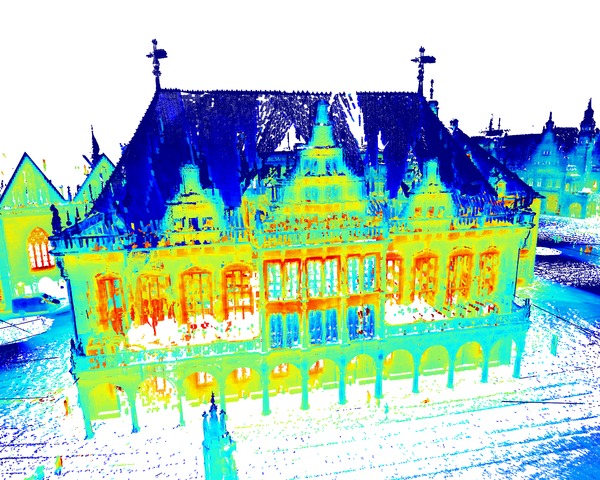
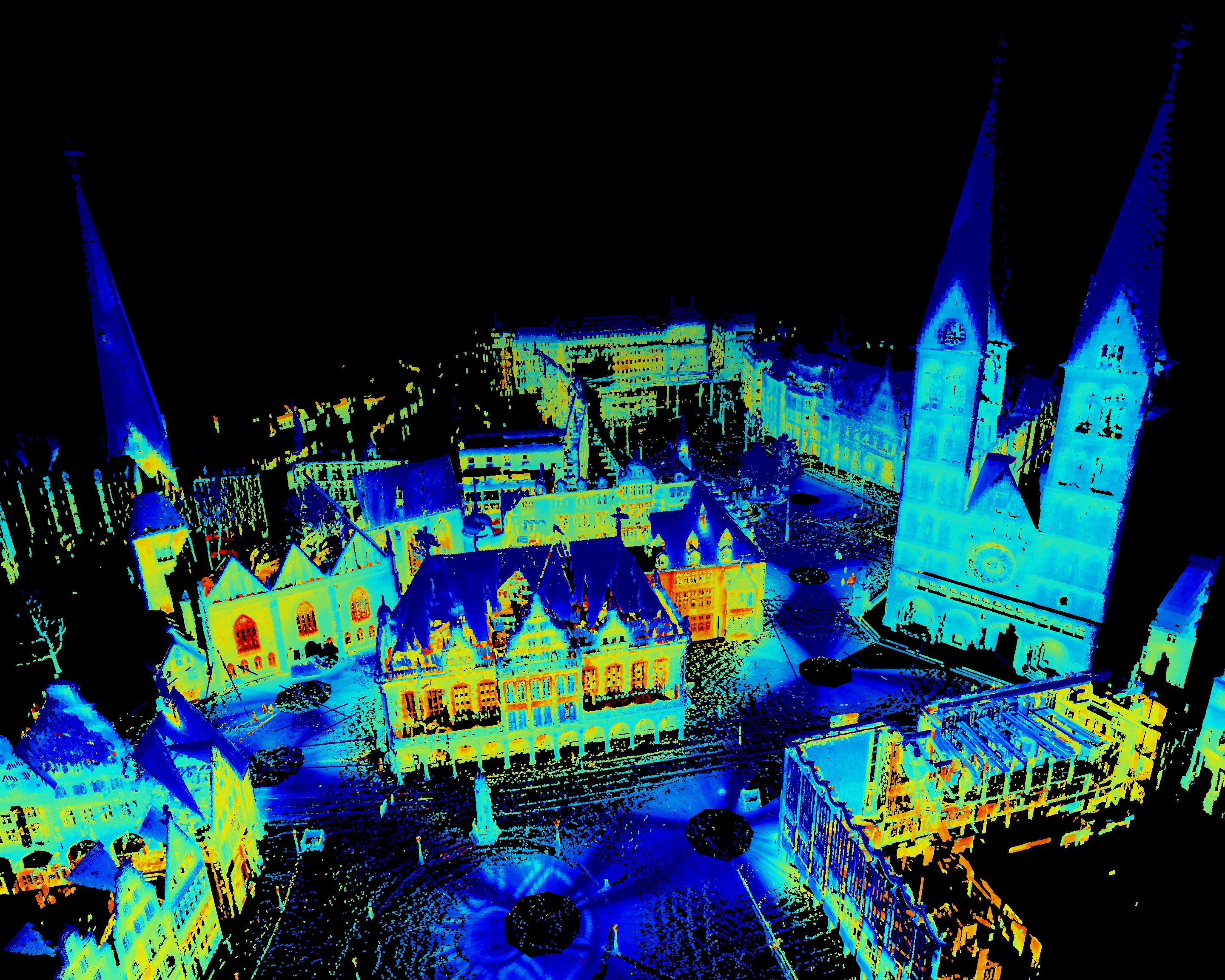
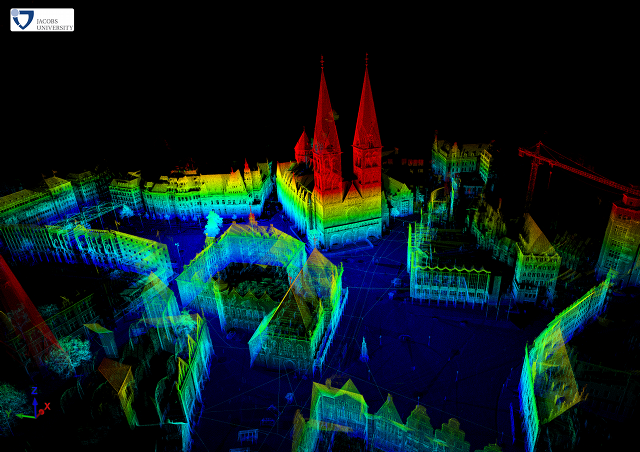
This data set was recorded using a Riegl VZ-400 and a Optris PI IR camera.
It contains several 3D scans taken in the city center of Bremen, Germany.
The data set consists of data collected at 11 different poses. The points from the laser scans are attributed with
the thermal information from the camera. Pose files are calculated using 3DTK based on odometry information.
You can download the complete data set
Further information can be found in the README.
-
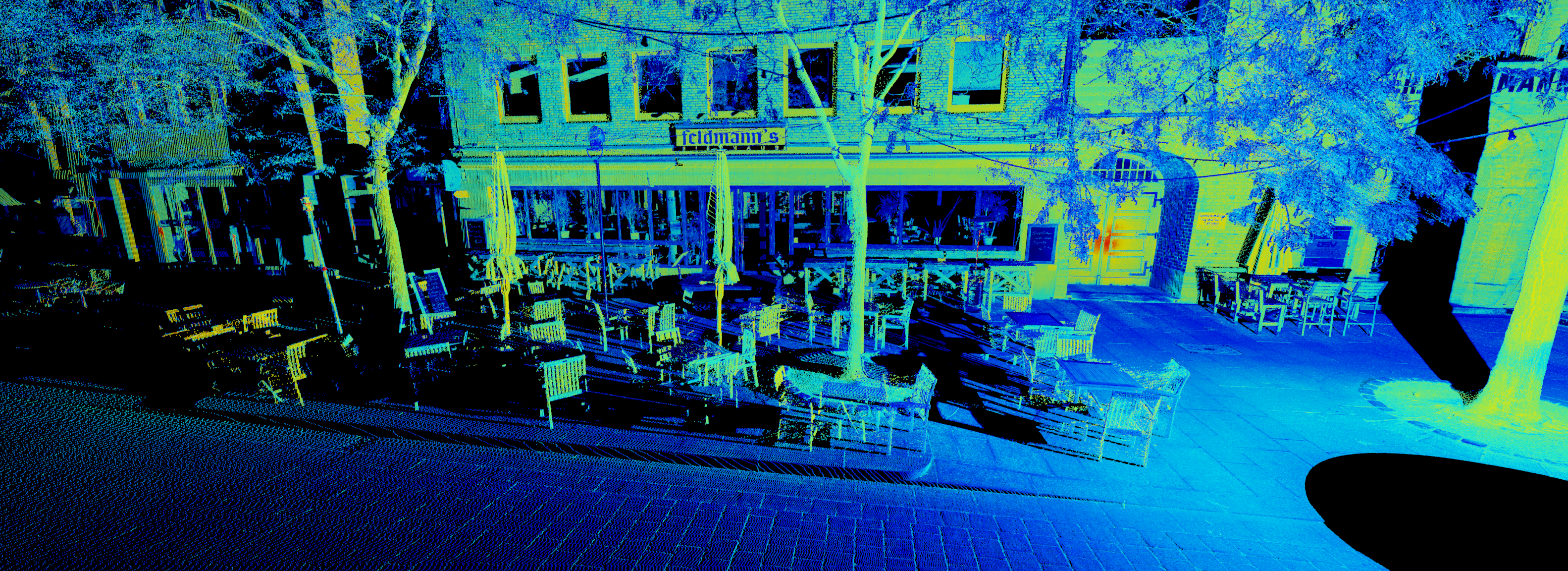
 by Dorit Borrmann and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
by Dorit Borrmann and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ-400 and a Optris PI IR camera.
It contains several 3D scans taken in downtown Bremen around the Gaussian Point, the central point of the first cartography of Bremen and its surroundings.
The data set consists of data collected at 3 different poses. The points from the laser scans are attributed with
the thermal information from the camera. Pose files are calculated using 3DTK based on odometry information.
You can download the complete data set
Further information can be found in the README.
-
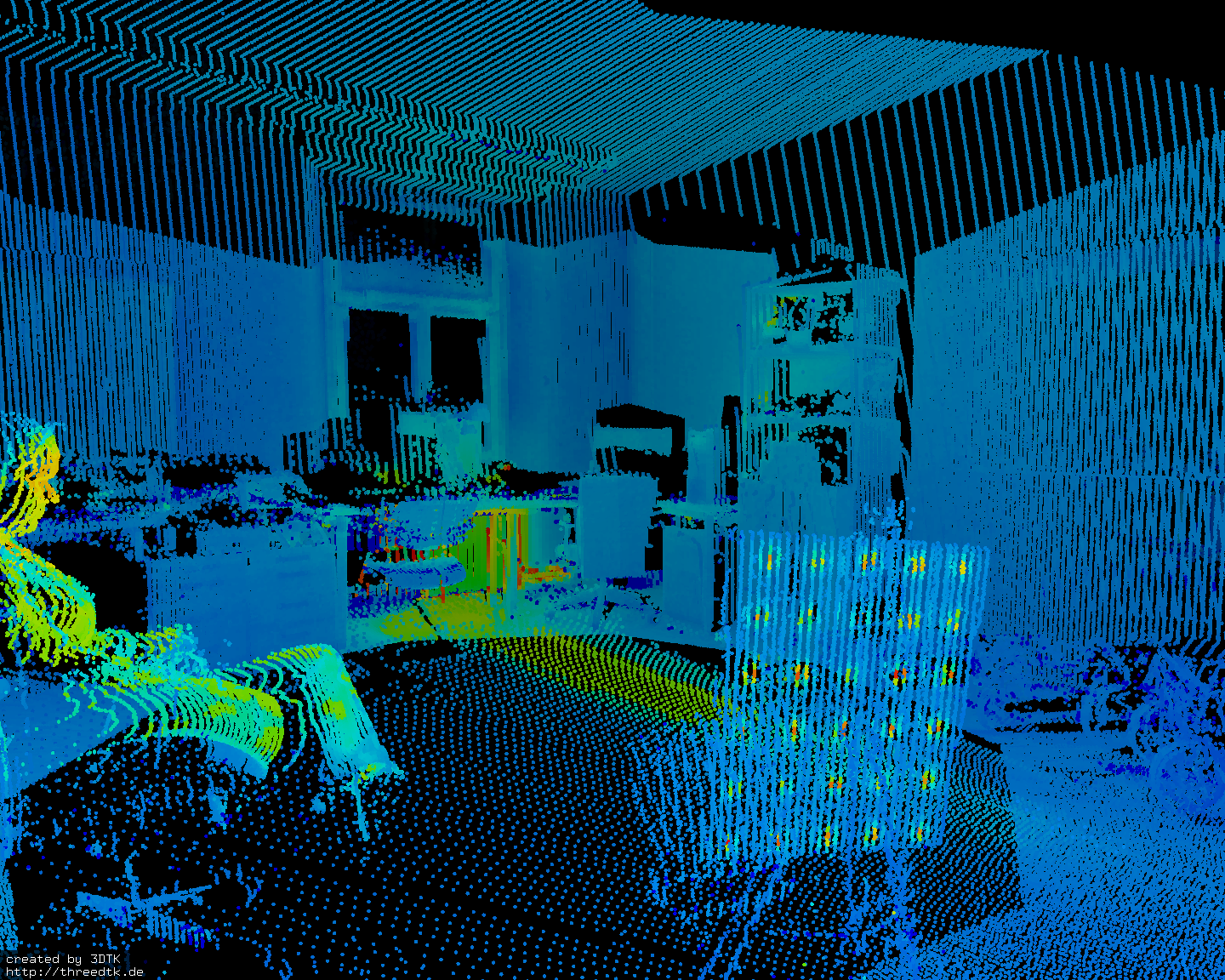
 by Dorit Borrmann from
Jacobs University Bremen gGmbH, Germany.
by Dorit Borrmann from
Jacobs University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ-400, a Optris PI IR camera and a Logitech QuickCam 9000 Pro camera.
It contains several 3D scans taken around the Automation Lab at Jacobs University Bremen.
The data set consists of data collected at different poses. The points from the laser scans are attributed with
the thermal information and color information from the cameras. Pose files are calculated using 3DTK based on odometry information.
You can download the complete data set
Further information can be found in the README.
-
 by Dorit
Borrmann, Jan
Elseberg, HamidReza Houshiar, and
Andreas Nüchter
from Jacobs
University Bremen gGmbH, Germany.
by Dorit
Borrmann, Jan
Elseberg, HamidReza Houshiar, and
Andreas Nüchter
from Jacobs
University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ-400 and a Canon 1000D
camera with 10 Megapixel. The camera has been co-calibrated with the
scanner, such that a color is mapped to the 3D points of the laser
scanner. The complete data set is given as text
file (x,y,z,r,g,b) using Riegl's coordinate system definitions as well
as in the .las format.
-
 by Prashant K.C.,
Dorit Borrmann,
Jan Elseberg, and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
by Prashant K.C.,
Dorit Borrmann,
Jan Elseberg, and
Andreas Nüchter from
Jacobs University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ-400 on the campus of the Jacobs University Bremen.
The data set contains 3D scans, covers almost all of the campus and is therefore quite large (122 scans @ 1.2 Gb each).
Using reflective markers, the scans were manually registered.
You can download the complete data set containing the point clouds and the poses obtained from the
manual registration.
In addition, we provide the accurate registration that was computed using 3DTK.
See this README for instructions on how to match the data set.

-
 by Dorit Borrmann, and Hassan Afzal from
Jacobs University Bremen gGmbH, Germany.
by Dorit Borrmann, and Hassan Afzal from
Jacobs University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ-400 and a Optris PI IR camera.
It contains several 3D scans taken around the Automation Lab at Jacobs University Bremen.
The data set consists of scans and thermal images taken at different poses.
You can download the complete data set containing the point cloud colored with
the thermal information and the poses obtained from odometry.
In addition, we provide the original data and the
calibration parameters. Further information can be found in the README.
-
 by Dorit
Borrmann,
and Jan
Elseberg, and Andreas
Nüchter from
Jacobs University Bremen gGmbH, Germany.
by Dorit
Borrmann,
and Jan
Elseberg, and Andreas
Nüchter from
Jacobs University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ-400, it contains several
3D scans taken at the Schlachte in Bremen. In addition, we provide
manually registrations using markers. You can download the data set in
two parts here: part 1
and part 2. Further information can be
found in the description of the Bremen City data sets.

-
 by Dorit
Borrmann,
and Jan
Elseberg, and Andreas
Nüchter from
Jacobs University Bremen gGmbH, Germany.
by Dorit
Borrmann,
and Jan
Elseberg, and Andreas
Nüchter from
Jacobs University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ-400 in December 2009. It
contains several 3D scans that have been registered manually using a
marker-based approach. The registration has be visially inspected and
verified. You can download the complete
data set. Furthermore, we provide
a README (Bremen city data set)
file and the poses obtained using
markers.
-
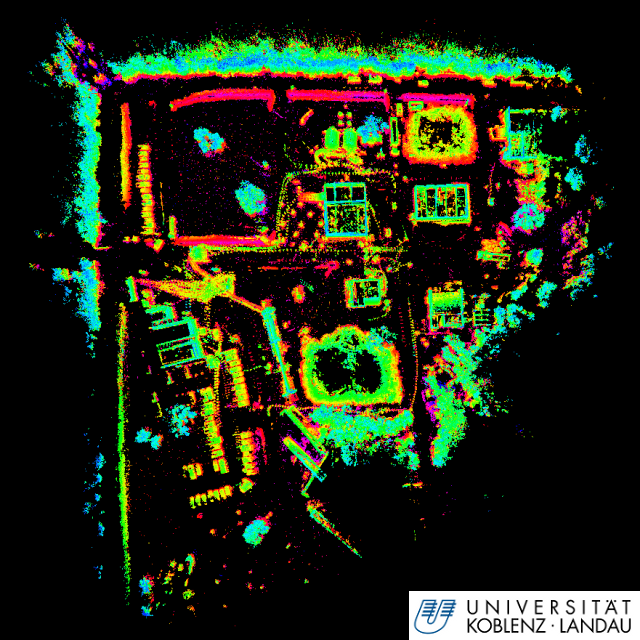 by Johannes Pellenz (WTD 51, Koblenz, Germany), Frank Neuhaus, Denis
Dillenberger and Dagmar Lang (Active Vision
Group, University of Koblenz-Landau, Germany).
by Johannes Pellenz (WTD 51, Koblenz, Germany), Frank Neuhaus, Denis
Dillenberger and Dagmar Lang (Active Vision
Group, University of Koblenz-Landau, Germany).
This data set was recorded using a Velodyne HDL-64E S2 during the
Response Robot Evaluation Exercise in March 2010 in Disaster City,
College Station, Texas (USA). The Velodyne 3D LRF data was captured
with 10 Hz, the IMU data with 100 Hz, the GPS data with 1 Hz and the
camera data with 30 Hz (MJPG compressed). The dataset features several
loops around Disaster City (on roads and through rough terrain with
slopes). The full logfile is available in the
Koblenz file format,
containing all the above mentioned sensor data.
Acknowledgements:
We thank Robert Bolling and Chris Scrapper from The MITRE Corporation for providing the robot Centaur and the sensors.
-
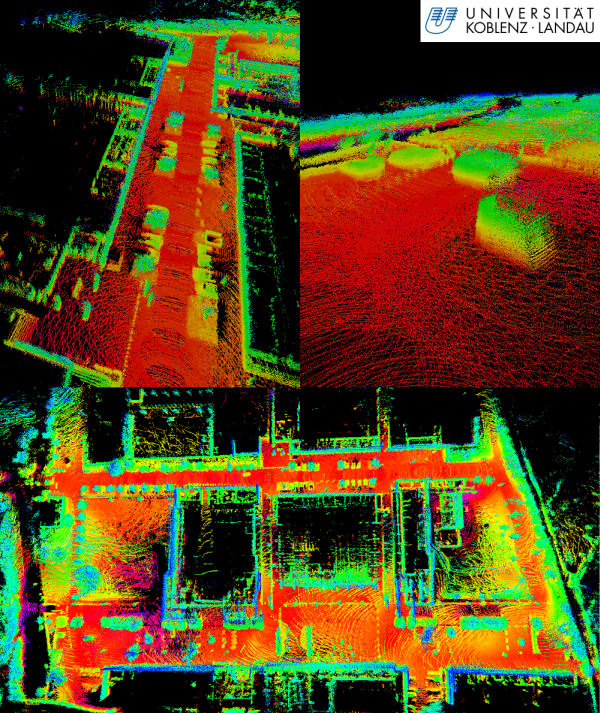
 by Johannes
Pellenz, and Dagmar Lang
(Active Vision Group, University of Koblenz-Landau, Germany).
by Johannes
Pellenz, and Dagmar Lang
(Active Vision Group, University of Koblenz-Landau, Germany).
This data set was recorded using a Velodyne HDL-64E S2 at the University
Campus of Koblenz. Apart from the Velodyne LRF, the following sensors
were mounted onto the car and recorded: front, left, right camera
(Philips SPC 1330 NC, 640x480, 30fps, MJPG compressed), xSens MT-i IMU,
Navilock USB GPS Receiver, Speed information delivered by an OBD device
attached to the car. The car drove two laps around the university campus.
The data set is available in two formats:
- The
scans of one Velodyne revolution per second, following the
data format used in Osnabrück.
- The full
logfile in Koblenz file format, containing all the above
mentioned sensor data. This file format is specified in the README file.
-
 by Dorit Borrmann, and Jan Elseberg from
Jacobs University Bremen gGmbH, Germany.
by Dorit Borrmann, and Jan Elseberg from
Jacobs University Bremen gGmbH, Germany.
This data set was recorded using a Riegl VZ400 Scanner in the city
center of Bremen. The single 3D scans have been initally merged using
markers as tiepoints, but the result can be improved
using slam6D. In the
following linked pdf-files the changes are visable
([PDF] Riegl markers as tie
points, [PDF] slam6D
matching. You can download
the complete data
set. Furthermore, we provide
a README file and
the final poses
are computed by
slam6D.
-
 by Stefan
Fuchs, Institute of Robotics
and Mechatronics, German Aerospace Center (DLR), Germany.
by Stefan
Fuchs, Institute of Robotics
and Mechatronics, German Aerospace Center (DLR), Germany.
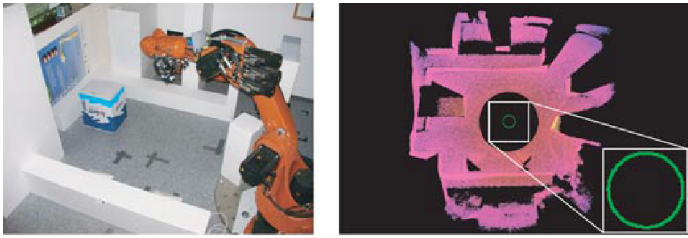
This data set was recorded using a Swissranger in a controlled
environment in the Institute of Robotics and Mechatronics at the
German Aerospace Center (DLR). The data set contains filtered 3D point
clouds as well as initial start guesses computed via feature matching
using the reflectance images. The files are converted into slam6D
files. You can download the complete data
set.
The the data set above contains filteres data, please
consult Stefan Fuchs' webpage
for the original data. The data was acquired using a KUKA manipulator
moving on a circular path with a diameter of 180mm. The 180 files
contain the complete loop, thus featuring steps of 2 degree.
-
 by Martin Magnusson, AASS, Örebro University, Sweden. by Martin Magnusson, AASS, Örebro University, Sweden.
This data set was recorded in the AASS building. It contains
60 3D scans in wrl format. The archive contains a README-file and a pose
file for the scans. You can download the complete
data set.
-
 by Oliver Wulf, Leibniz University, Hannover, Germany. by Oliver Wulf, Leibniz University, Hannover, Germany.
This data set was recorded at the University Campus. It contains
924 3D scans, covering a trajectory of about 1.24 km. Each 3D scan contains
approx. 16,600 data points. The single 3D scans
as well as initial pose estimates are given. You can
download the complete data set. Please refer to
README for further information about the
file formats.
-
 by Oliver Wulf, Leibniz University, Hannover, Germany. by Oliver Wulf, Leibniz University, Hannover, Germany.
This data set was recorded at the University Campus. It contains
468 3D scans, each with approx. 20,000 data point. The single 3D scans
as well as initial pose estimates are given. You can
download the complete data set or parts of it. Please refer to the file README for further information about the
file formats.
For the above two data sets Hannover1 and Hannover2 ground truth data is
availabe on request. Please contact Andreas Nüchter to get this
data.
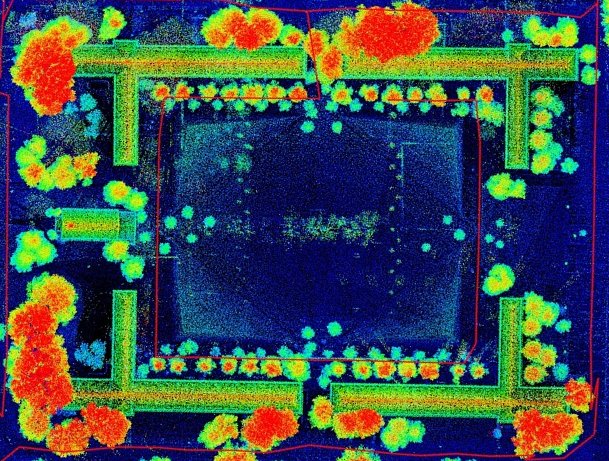
For the area ground truth data in form of a 2D map provided by the
German land registry office (Katasteramt) is available. This map
contains the buildings with a precision of 1 cm. In addition, we
obtained airborne based 3D data. Based on this data so-called
reference data is generated as follows (see Figure below): The 2D map
is extrapolated to 3D by vertical 3D points and fused with the 3D data
from the airplane. The result is a precise 3D reference map. Using
this 3D reference map, we generate ground truth poses for all 3D laser
scans by matching the scans with the reference map.
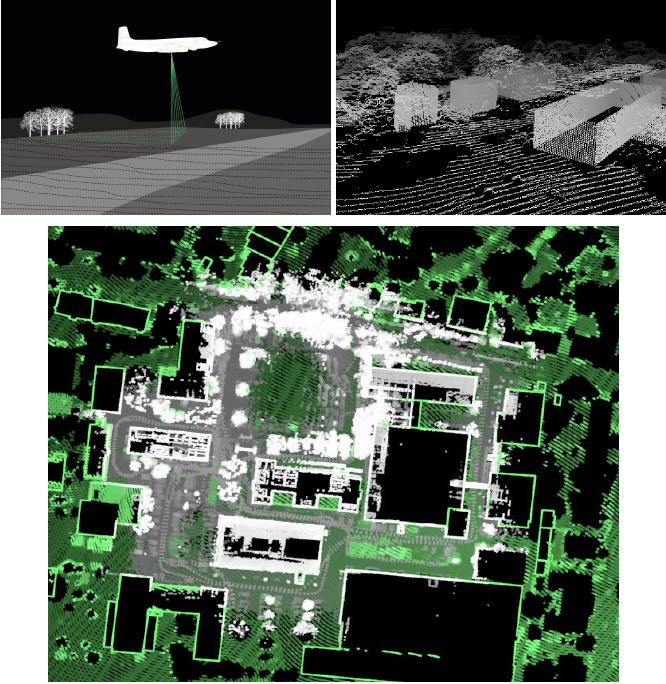
We thank Claus Brenner (Leibniz
University of Hannover) for letting us use the airborne 3D data.
-
 by Andreas
Nüchter and Kai
Lingemann, University of Osnabrück, Germany. by Andreas
Nüchter and Kai
Lingemann, University of Osnabrück, Germany.
This data set was recorded at Dagstuhl castle,
during the workshop Towards
Affordance-Based Robot Control. It contains 82 3D scans, each
with 81,360 data point. The single 3D scans and a precise
6D pose information are given. You can download the complete data set or parts of it. Please refer to the file README for further information about the
file formats.
-
 by
Martin
Magnusson (AASS, Örebro,
Sweden), Andreas
Nüchter (University of
Osnabrück, Germany) and Christopher
Lörken (University of
Osnabrück, Germany). by
Martin
Magnusson (AASS, Örebro,
Sweden), Andreas
Nüchter (University of
Osnabrück, Germany) and Christopher
Lörken (University of
Osnabrück, Germany).
This data set was recorded at the Kvarntorp mine, near to Örebro,
Sweden. It contains the data of 4 independent robot runs with over
250 3D scans, each with 81,360 data points. The single 3D scans and a
pose estimte by odometry (2D) are given. You can download the complete data set. Please refer to the
file README for further information
about the file formats.
-
 by
Dorit Borrmann,
Jan Elseberg,
Andreas
Nüchter, and Kai
Lingemann (all University of
Osnabrück, Germany). by
Dorit Borrmann,
Jan Elseberg,
Andreas
Nüchter, and Kai
Lingemann (all University of
Osnabrück, Germany).
This data set was recorded at the AVZ building of University of Osnabrück,
Germany. It contains the data of 63 3D scans, each with 81.360 data
points. The single 3D scans and a pose estimte by odometry (2D) are
given. You can download the complete data
set, including a readme file. It contains two closed loops.
-
 by
Johannes
Pellenz, and Peter Schneider (University
of Koblenz-Landau, Germany). by
Johannes
Pellenz, and Peter Schneider (University
of Koblenz-Landau, Germany).
This data set was recorded during the RoboCup Rescue Competition 2008 in
SUZHOU CHINA. The format follows the convention used in
Osnabrück, so please see
readme
for a format description. You can download the complete data set
-
 by
Hartmut Surmann (Fraunhofer IAIS, Sankt
Augustin, Germany), Andreas
Nüchter (University of
Osnabrück, Germany) and Kai
Lingemann (University of
Osnabrück, Germany). by
Hartmut Surmann (Fraunhofer IAIS, Sankt
Augustin, Germany), Andreas
Nüchter (University of
Osnabrück, Germany) and Kai
Lingemann (University of
Osnabrück, Germany).
This data set was recorded at the Fraunhofer Campus Sankt Augustin,
Germany. It contains the data of 76 3D scans, each with 81.360 data
point. The single 3D scans and a pose estimte by odometry (2D) are
given. You can download the complete data
set. Please refer to the file README for further information
about the file formats.
-
 by Andreas
Nüchter University of
Osnabrück, Germany. by Andreas
Nüchter University of
Osnabrück, Germany.
This data set was recorded at the University of Osnabrück,
Germany. It contains 29 3D scans and each 3D scan was recorded with
remission values. This value quantifies the amount of light that was
returned to the scanner, i.e., a grey value. This data set has been
used to evaluate object detection functions. You can download the complete data set. Please refer to
the file README for further
information about the file formats.
-
 by Andreas
Nüchter University of
Osnabrück, Germany. by Andreas
Nüchter University of
Osnabrück, Germany.
This data set was recorded at the Fraunhofer Campus Sankt Augustin,
Germany. It contains 100 3D scans of one or two human and each 3D scan
was recorded with remission values. This value quantifies the amount
of light that was returned to the scanner, i.e., a grey value. This
data set has been used to learn the 3D object human. You can download
the complete data set. Please refer to the
file README for further information
about the file formats.
|