
|
|
Institute of Computer Science — Knowledge-Based Systems Research Group |
Project – UOSSim (USARSim) New |
USARSIM is a worldwide used robot simulator deployed in Urban Search and Rescue (USAR) and in the context of the RoboCup Rescue Real Robot contest. It is designed as a simulation companion to the National Institute of Standards (NIST) reference test facility for autonomous mobile robots for urban search and rescue. This page describes the USARSIM simulator for KURT2 and Kurt3D robot platforms, which we are using in both education and research. As simulation is done on the device level, a seamless integration of real robot control software with the simulations becomes possible.
The aim of our reseach in UOSSim is the seamless integration of the
simulator to our exsisting robot control software, as given in the
following code snippet. Here we read instead from the RS422 scanner
device from a simulation client:
#ifdef USARSIM
res = sim_client.SICK_read(fd_RS422, buf, 255);
#else
res = read(fd_RS422, buf, 1);
#endif


(Left: Photo of the real Kurt3D robot. Right: Simulation.)
The integration part of the robot control software consist of a few C++ classes that you can download. Simulation on device level means also to encode, e.g., the USARSIM range values into the SICK protocol in order to feed the data into the very same functions. (In our software architecture we transmit directly the SICK protocoll to the operator station.)
Since we are involved in industry projects with parts of our robot control software we cannot make the entire software available.


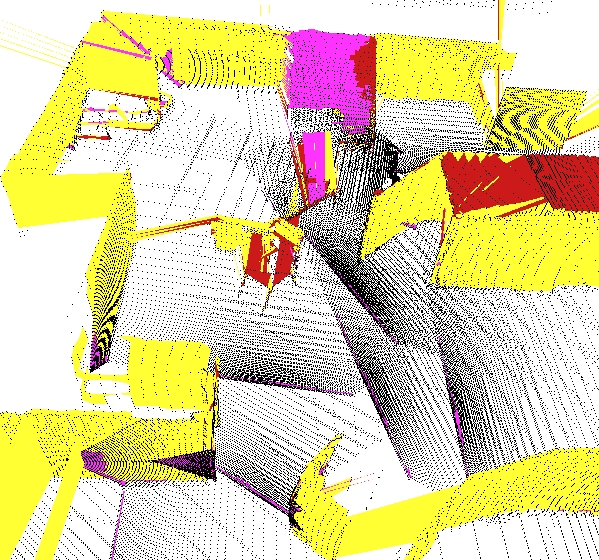
(Left: Photo of the real environment. Right: Simulation.)
If you have any questions about the current state of UOSSim please contact:
Andreas Nüchter| Andreas Nüchter |