NEWS
- You can now find the slides from the tutorial presentations here.
- We uploaded a VM disk image with the software and datasets for the tutorial here.
Abstract
The increasing need for rapid characterization and quantification of
complex environments has created challenges for data analysis. This
critical need comes from many important areas, including industrial
automation, architecture, agriculture, and the construction or
maintenance of tunnels and mines. 3D CAD models are necessary for
factory design, facility management, urban and regional planning On
one hand, precise 3D data is nowadays reliably obtained by using
professional 3D laser scanners. On the other hand, efficient,
large-scale 3D point clouds processing is required to process the
enormous amount of data. The tutorial will give insights to state of
the art acquisition methods and software for addressing these
challenges.
Motivation and Objectives
Recently, 3D point cloud processing became popular in the robotics
community due to the appearance of the Microsoft kinect camera. The
kinect is a structured light laser scanner that obtains a colored 3D
point cloud also called RGB-D image, with more than 300000 points at a
frame rate of 30Hz. The optimal range of the kinect camera is 1.2 to
3.5 meters and is well suited for indoor robotics in office or
kitchen-like environments. Besides the boost of 3D point cloud
processing through the kinect, the field of professional 3D laser
scanning has advanced.
Light Detection and Ranging (LiDAR) is a technology for
three-dimensional measurement of object surfaces. Aerial LiDAR has
been used for over a decade to acquire highly reliable and accurate
measurements of the earth's surface. In the past few years,
terrestrial LiDAR systems were produced by a small number of
manufacturers. When paired with classical surveying, terrestrial LiDAR
delivers accurately referenced geo-data.
The objective of the tutorial is to present the state of the art 3D
scanning technology and recent developments for efficient processing
of large scale 3D point clouds. Scenes scanned with LiDARs contain
often millions to billions of 3D points. The goal of the tutorial is
to give an overview of existing techniques and enable field
roboticists to use recent methods and implementations, such as
3DTK - The 3D Toolkit and the
Las Vegas
Reconstruction Toolkit. We create reference material for the
participants for subtopics like 3D point cloud registration and SLAM,
calibration, filtering, segmentation, and large scale surface
reconstruction.
To achieve the objectives and to gain hands-on experiences on the
problems occurring, when trying to process large-scale 3D point
clouds, the tutorial consists of presentations, software
demonstrations and software trials. To this end, participants have to
bring their Linux, MacOS or Windows laptops.
Intended Audience
The tutorial consists of several interleaved theoretical and practical
parts. This makes the tutorial well-suited for motivated students at
all levels (Bachelor, Master, and PhD students) as well as all
roboticists who want to gain hands-on experiences on the problems
occurring, when trying to process 3D data. Experts, escpecially
roboticists having experiences with the point cloud library, are
particularly welcomed as well.
List of Speakers
In alphabetical order:
- HamidReza Houshiar, Jacobs University Bremen gGmbH, Germany
- Andreas Nüchter, University of Würzburg, Germany
- Thomas Wiemann, Osnabrueck University, Germany
- TBA
Participation
To participate at the full-day tutorial please register for the
tutorial at the ICAR 2013
conference.
List of Topics
Introduction and Overview of Laser Scanning Systems
A general review of range sensor systems is given in the introduction
including triangulation and LiDAR systems. State of the art in
terrestrial large volume data acquisition is to use high resolution
LiDAR systems. These sensors emit a focused laser beam in a certain
direction and determine the distance to an object by measuring the
reflected light. By measuring the time difference between the emitted
and measured signal, the distance to an object surface can be
calculated. Laser range finders are distinguished by the method used
to determine the object's distance.
Pulsed wave systems emit a short laser flash and measure the time
until the reflected signal reaches the sensor. By the constant speed
of light, the distance is calculated (time-of-flight method). Since
the speed of light is as fast as 300000 km per second, a time
resolution of just about a few pico seconds is necessary to reach an
accuracy of about 10 mm. Depending on the intensity of the laser
light, very high maximum ranges (up to 1000 m) can be
achieved. Besides pulsed laser scanners, systems using continuous
light waves exist. They determine the running time of the laser light
by measuring the phase shift between the emitted and detected
signal. Since the phase shift is only unambiguous in the interval
between 0 and 180 degrees, their maximum range is limited, depending
on the wavelength of the laser light. Typical values are about 80
m.
Basic Data Structures and Point Cloud
Filtering
In this part of the tutorial we cover the problem of
storing the data. Due to large environments, the high amount of data,
and the desired precision (millimeter scale), grid based approaches,
that are commonly used for planar indoor environments in robotics do
not work well. We present different types of range images, an octree
with low memory footprint and k-d trees. As the choice of the data
structure depends on the algorithms, we identify the algorithmic
requirements, and how and which data structures support the tasks.
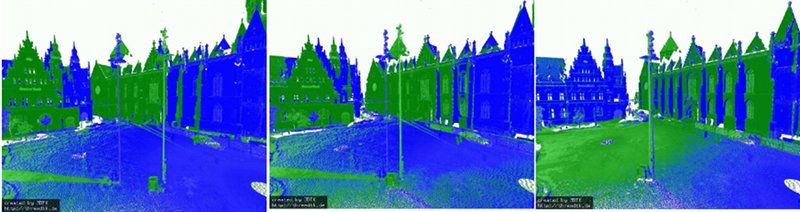
Three levels of
detail for an efficient octree-based visualization. A
corresponding octree cubes drawing is given in the bottom right
part.
Precise Registration and the SLAM Problem
After a precise 3D scanner captured its environment the data has to be
put into a common coordinate system. Registration aligns this
data. Computing precise registrations means solving the SLAM
problem. For general 3D point clouds, one has to work with six degrees
of freedom. Roughly the approaches can be categorized as follows:
Segmentation and Normal Estimation
Three core components of human perception are grouping, constancy, and
contrast effects. Segmentation in robot vision approaches this natural
way of observing the world by splitting the point clouds in components
with constant attributes, and grouping them together. On range images,
a few existing image based segmentation methods can be applied. Pure
point cloud segmentation methods rely only on geometry information. As
the local geometry of a point cloud is described by surface normals,
we presents methods for computing these normals efficiently.
Normal
based segmentation of a 3D point cloud acquired in a room with an
open door.
Meshing and Polygonal Robot Map Generation
Three dimensional environment representations play an important role
in modern robotic applications. They can be used as maps for
localization and obstacle avoidance as well as environment models in
robotic simulators or for visualization in HRI contexts, e.g., tele
operation in rescue scenarios. For mapping
purposes, when building high resolution maps of large environments,
the huge amount of data points poses a problem. A common approach to
overcome the drawbacks of raw point cloud data is to compute polygonal
surface representations of the scanned environments. Polygonal maps
are compact, thus memory efficient, and, being continuous surface
descriptions, offer a way to handle the discretization problem of
point cloud data.
n the context of mobile robotics, polygonal environment maps offer
great potential for applications ranging from usage in
simulators, virtual environment modeling for tele
operation to robot localization by generating virtual scans via ray
tracing. Integrating color information from camera
images or point cloud data directly adds an additional modality to the
representation and offers the possibility to fuse a compact geometric
representation with local color information. However, creating
polygonal environment maps based on laser scan data manually is
a tedious job, hence we will present methods to automatically compute
polygonal maps for robotic applications that are implemented into the
Las Vegas Surface Reconstruction Toolkit. We will
demonstrate several use-cases for such maps like using them as
environment maps in Gazebo or for generation of synthetic point cloud
data for localization purposes using ray tracing.

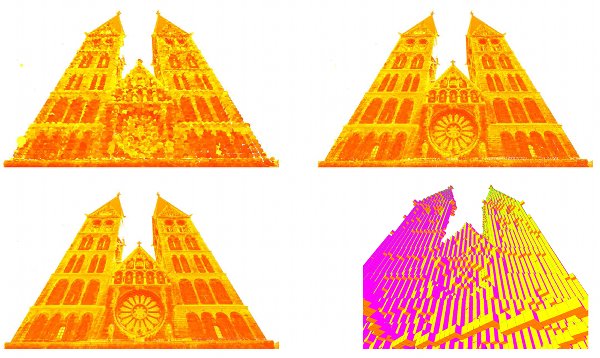
Example
reconstruction using LVR. The input point cloud (left) is
automatically transferred into a textured polygonal
representation. The number of elements in the stored data was
reduced from 12 million colored points to 82.000 textured triangles
using 126 bitmaps.
Semantic 3D Mapping
A recent trend in the robotics community
is semantic perception, mapping and
exploration , which is driven by scanning scenes with RGB-D
sensors. A semantic map for a mobile robot is a map that
contains, in addition to spatial information about the environment,
assignments of mapped features to entities of known classes. Further
knowledge about these entities, independent of the map contents, is
available for reasoning in some knowledge base with an associated
reasoning engine. In this part of the tutorial we explore, how
background knowledge gives a boost to model-based object recognition
in large-scale 3D laser data.

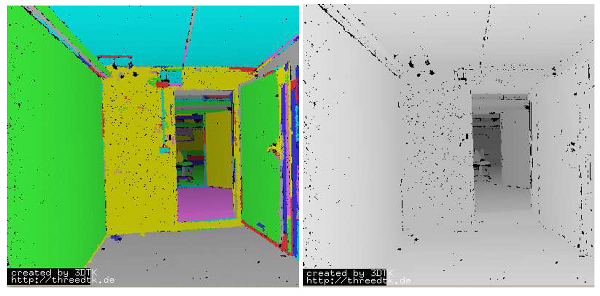
Semantically labeled point cloud of an office scene. The
detected furniture was recognized using plane detection and
background knowledge about the planar relations within the
corresponding CAD models.
Schedule
The Tutorial will take place on Monday, the 25th of November. Each of
the parts will contain a lecture followed by software demonstrations
and programming sessions.
A detailed schedule will be released soon.
Supporting Materials
Here you can find the slides from the tutorial presentations:
3D Point Cloud Processing - Introduction
3D Point Cloud Processing - Basic Data Structures
3D Point Cloud Processing - Registration
3D Point Cloud Processing - Mobile Mapping
3D Point Cloud Processing - Features
3D Surface Reconstruction - Las Vegas Reconstruction
We have prepared a Virtual Machine Disk file containing all software
and data sets needed for the tutorial. You can obtain it as single
file or splitted into 4GB chunks for FAT file systems:
Full image (26 GB)
Splitted Image Part 1
Splitted Image Part 2
Splitted Image Part 3
Splitted Image Part 4
Splitted Image Part 5
Splitted Image Part 6
Splitted Image Part 7
Contact
Main Organizer
Andreas Nüchter
Informatics VII : Robotics and Telematics
Julius-Maximilians-University Würzburg
Am Hubland
D-97074 Würzburg
Germany
|
Co-Organizer
Thomas Wiemann
University of Osnabrück
Institute of Computer Science
Albrechtstraße 28
D-49069 Osnabrück
Germany
|
|